Arriba 95+ Foto kinematic analysis of parallel manipulators by algebraic screw theory El último
¡Descubre las increíbles imágenes de kinematic analysis of parallel manipulators by algebraic screw theory en huanluyenantoan.edu.vn! Este sitio web ha recopilado cuidadosamente y elaborado una selección de imágenes. Además, hay más imágenes relacionadas disponibles en . ¡No te lo pierdas!
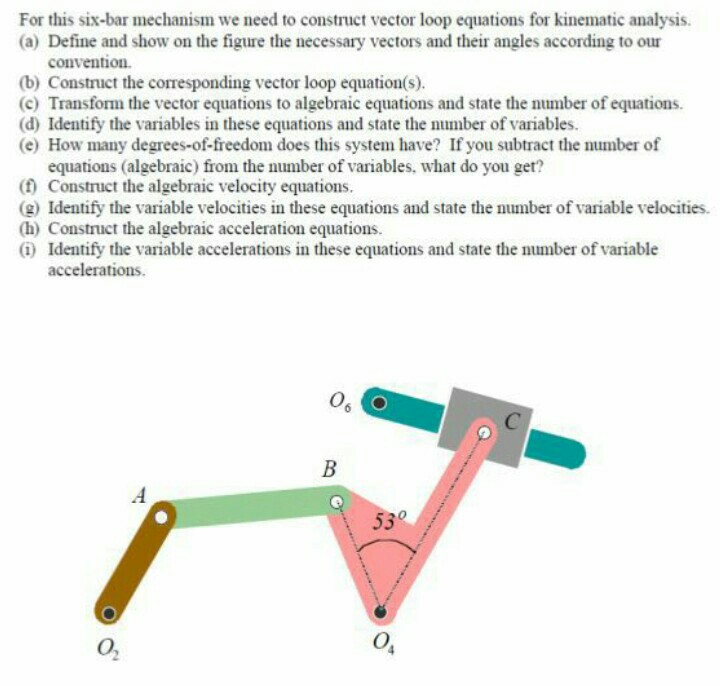
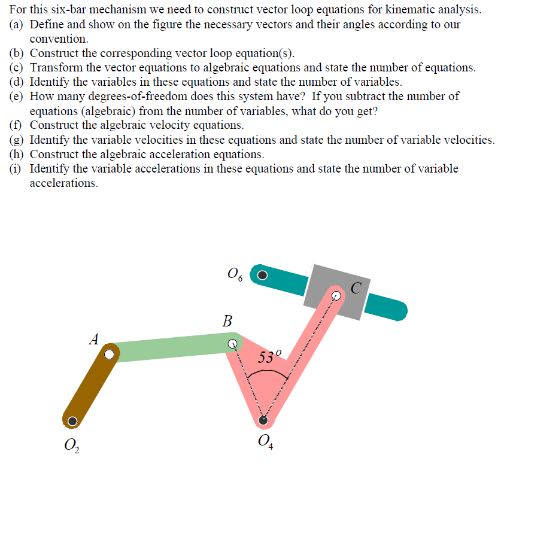
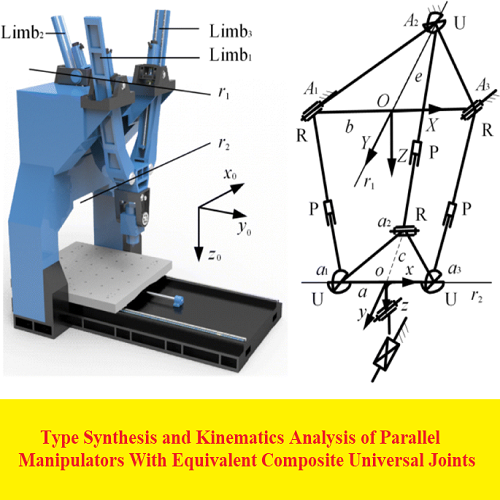
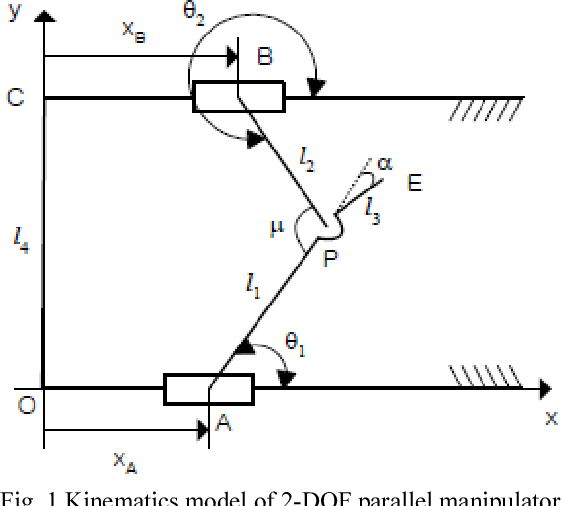
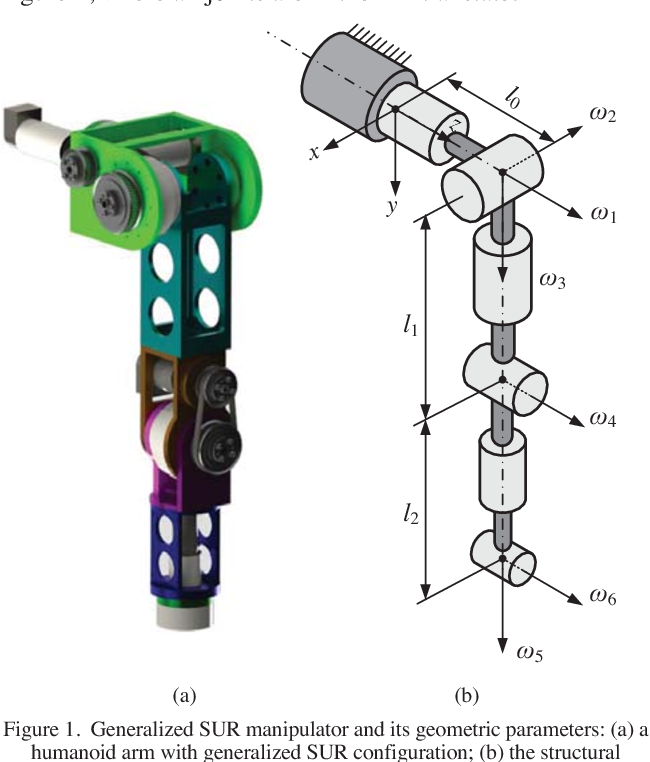
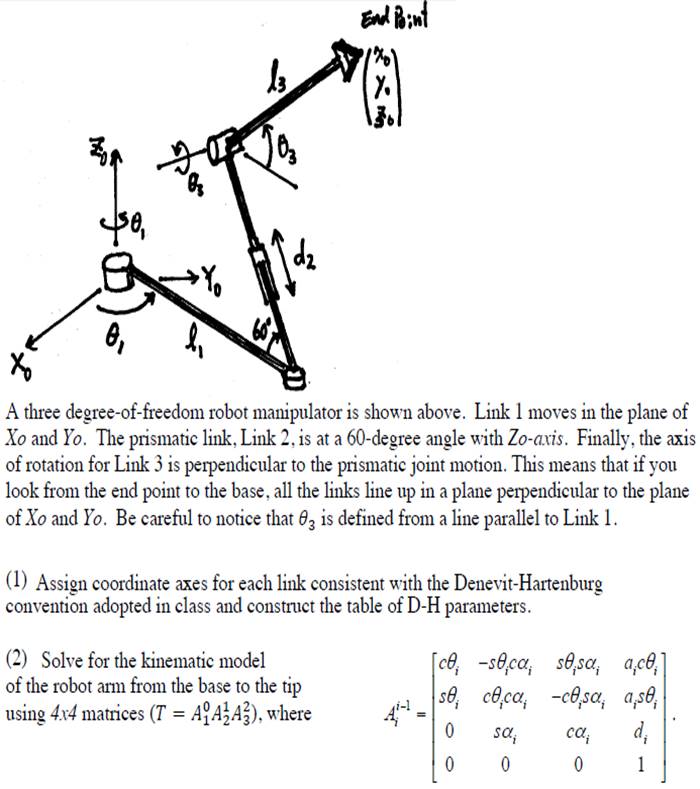
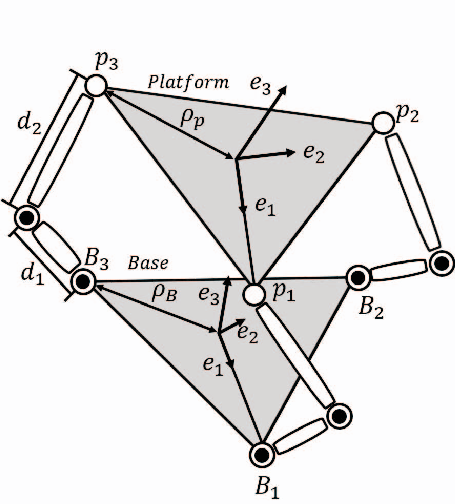
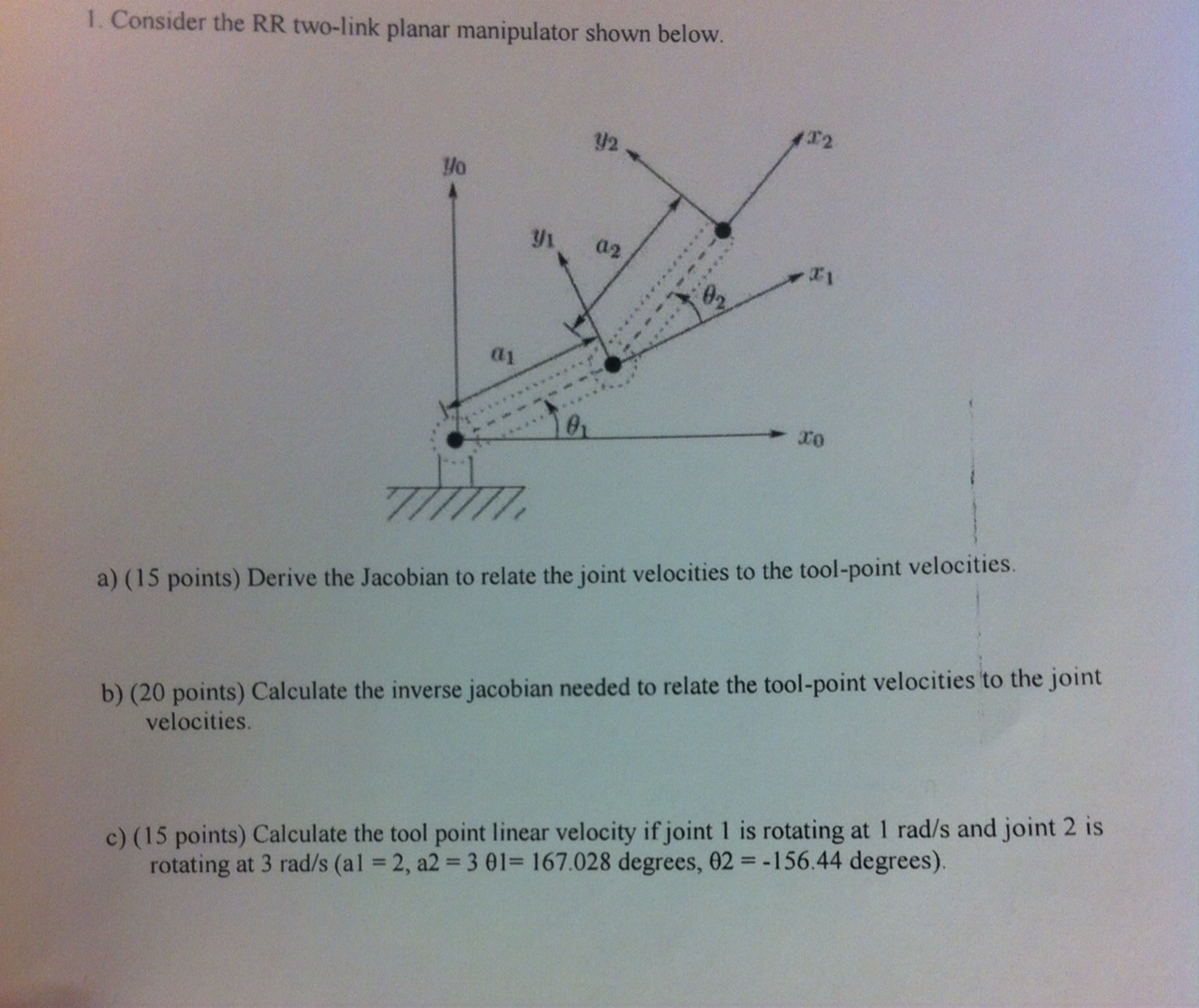
kinematic analysis of parallel manipulators by algebraic screw theory













































































¡Agradecemos que hayas leído el apasionante artículo sobre kinematic analysis of parallel manipulators by algebraic screw theory en huanluyenantoan.edu.vn! No dudes en comentar y descubrir más artículos relacionados en la sección siguiente. Esperamos que encuentres información valiosa e interesante.
Posts: kinematic analysis of parallel manipulators by algebraic screw theory
Categories: El álbum
Author: huanluyenantoan.edu.vn